高压放大器ATA-7030在电致变形柔性致动器表情机器人控制实验中的应用
实验名称:
高压放大器ATA-7030在电致变形柔性致动器表情机器人控制实验中的应用
实验方向:
基于智能材料的柔性器件设计
实验设备:
ATA-7030高压放大器、激光位移传感器,示波器、上位机等
实验内容:
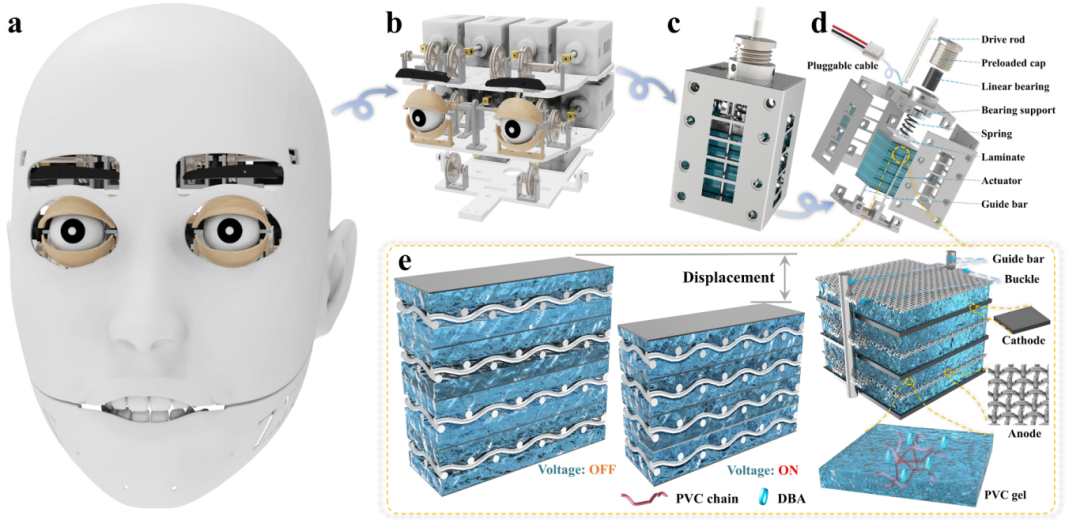
该表情机器人的核心柔性器件是采用PVC凝胶电致伸缩柔性材料与不锈钢金属网状电极层叠而成。在电场作用下,凝胶会发生蠕动变形,致使凝胶在电场下填入网状电极的网孔内部,从而发生厚度方向的伸缩运动。去电后回复原始状态。通过ON-OFF的控制实现类似生物肌肉的伸缩运动。可以通过调整电场信号的波形和频率可实现不同形式的变形运动。该过程需要通过功率放大器将电信号放大10-100倍,从而驱动各个柔性器件进行变形运动,从而实现表情机器人的不同表情的变化。
 实验过程:
实验过程:
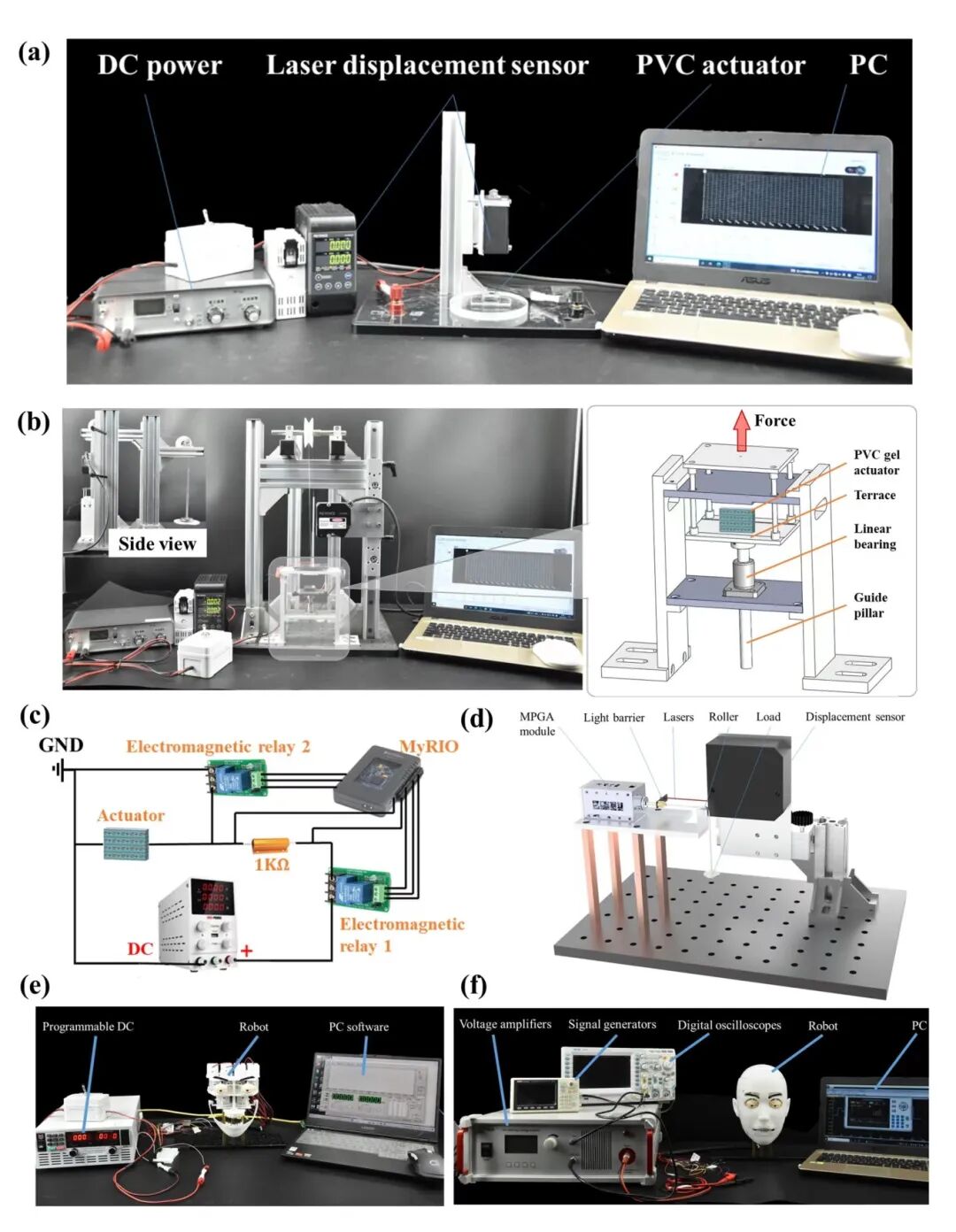
基于ATA-7030功率放大器搭建了表情机器人的测试平台。实验设备包括信号发生器,ATA-7030功率放大器,激光位移传感器,示波器等。
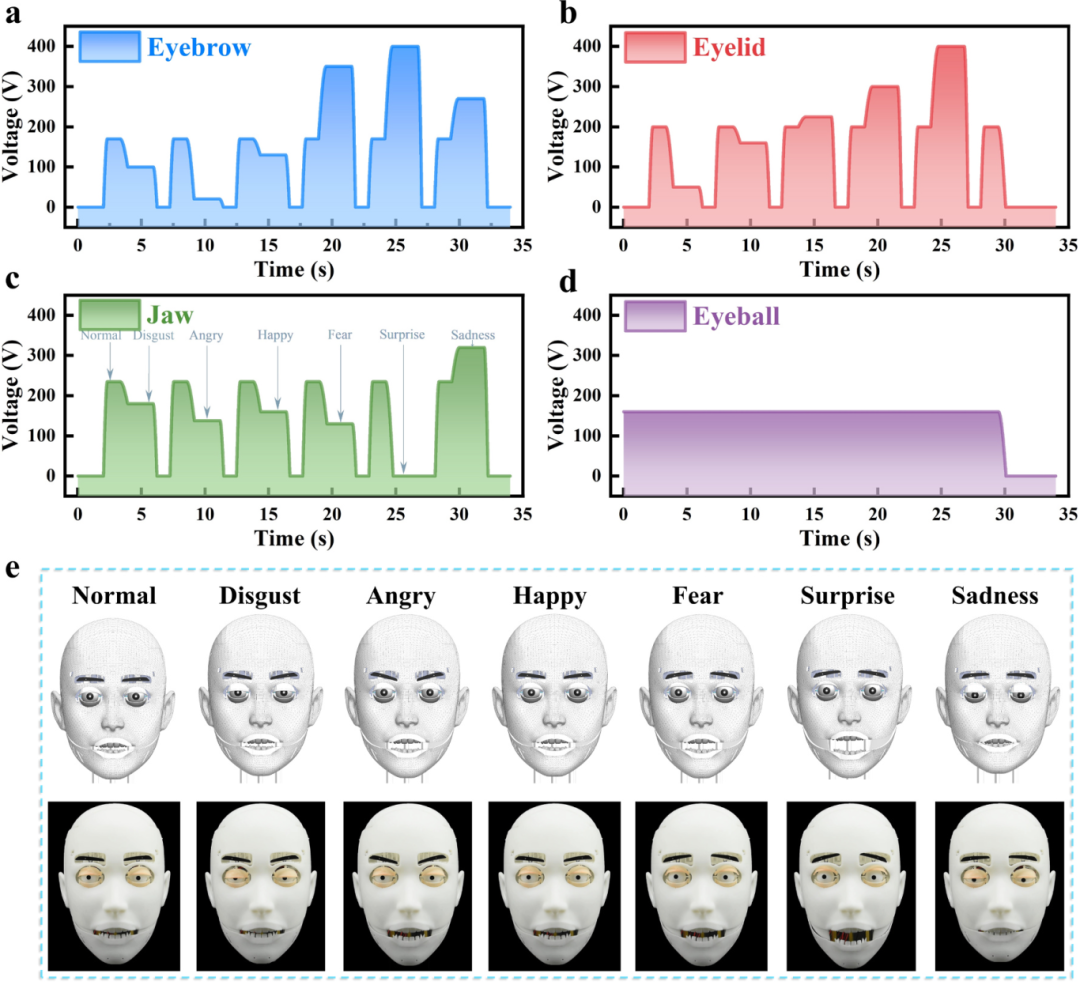
通过信号发生器将不同样式和频率的电信号(-10-10V)发送给ATA-7030功率放大器,经过50倍左右放大倍数输入约500V左右的高压驱动表情机器人各个模块的柔性器件运动,从而实现机器人的不同表情的变化。
实验结果:
结果表明,ATA-7030功放能够稳定的放大不同类型和频率的信号,从而实现柔性致动器件的不同形变以及最终实现表情机器人的不同表情。
模块化封装前后的柔性驱动器具有同等的驱动特性,封装后的位移减少仅为10%左右。同时,针对不同的输入信号,驱动器的输出位移的变化能较好地跟随输入电压的变化,一万次循环驱动后,柔性驱动器的位移损失仅为5%左右,具有较好的循环寿命。结果显示ATA-7030功率放大器能够稳定的放大不同类型和频率的输入信号,具有响应快、放大倍数大以及输出误差小的特点,能满足柔性驱动器的非规则定制化输入信号的信号处理任务,从而实现柔性致动器件的不同形变,最终实现表情机器人的不同表情的变化。
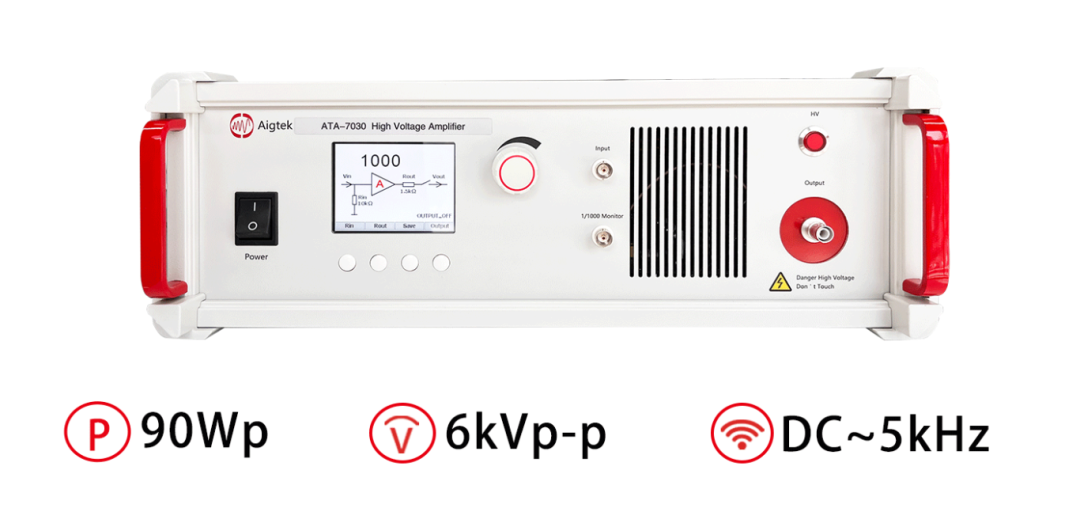
实验中用到的ATA-7030高压放大器的参数指标:
更多功率放大器相关应用:
高压放大器ATA-2082在射流气液界面波动的超声波测量中的应用
ATA-7030高压放大器在多体系油相液滴交流电场行为控制中的应用
ATA-2031高压放大器在聚合物稳定液晶抑制散斑方面的应用
ATA-7020高压放大器在数字微流控的即时凝血检测技术研究中的应用
关于安泰电子
西安安泰电子科技有限公司(Aigtek)是国内领先从事测试仪器研发、生产和销售的高科技企业。公司致力于功率放大器、功率信号源、计量校准源等产品为核心的相关行业测试解决方案的研发和生产。提供免费样机试用,免费专业工程师培训,免费测试技术交流。



