人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制
前言
近两年,中国人形机器人产业进入快速发展阶段。从特斯拉 Optimus 到国内众多创新企业,人形机器人正逐渐从实验室走向工业制造、服务机器人、医疗康复等更多应用场景。
但在炫目的机械结构与AI算法之外,有一个关键问题常常被忽略:机器人如何精准地“动起来”?这背后的核心技术就是机器人运动学(Robot Kinematics)控制。
在机器人系统中,运动学用于描述机械结构之间的空间关系,并计算机械臂或关节的姿态与位置变化。通过数学模型和控制算法,机器人能够根据关节角度或执行器运动,实现精准的位置控制和轨迹规划。
随着机器人应用的复杂度不断提升,传统标准机器人方案已经难以满足需求,越来越多企业开始探索任务专用机器人运动学结构(Task-specific Kinematics)。
一
为什么企业选择“定制机器人运动学”
在传统工业自动化中,很多设备制造商依赖标准工业机器人。但随着竞争加剧,这种模式逐渐暴露出问题:产品同质化严重,难以体现设备差异化优势,也难以向客户清晰传递产品的核心优势。
因此,越来越多设备制造商开始转向定制化机器人运动结构。通过根据应用需求设计专用运动结构(Robot Kinematics),企业可以:
优化机械结构设计
提升设备效率与精度
降低系统复杂度
实现更高的应用适配性
虽然前期开发成本更高,但长期来看,这种方式可以带来更高的产品竞争力以及更快的交付能力。
目前,这种技术不仅应用于工业自动化,还正在进入医疗机器人、服务机器人、老年护理机器人、航天机器人,甚至在人形机器人领域,也越来越依赖复杂运动学建模。
二
机器人控制的核心:统一控制平台
在机器人系统中,真正的挑战不仅在机械结构,还在控制系统架构。一个成熟的机器人控制平台需要同时完成:
PLC控制
运动控制
CNC功能
机器人运动学计算
多轴同步控制
安全控制
这对控制器性能和软件架构提出了极高要求。例如,基于CODESYS的开放自动化平台,可以实现PLC、运动控制和机器人控制的统一架构。
在这一架构下,控制系统可以直接实现:
机器人运动学变换
多坐标系位置计算
轨迹规划与插补
机器人功能模块调用
从而将PLC控制器升级为完整的机器人运动控制系统。
三
一套控制系统,完成机器人全部控制
通过集成机器人运动控制软件模块,控制系统可以直接支持:
01
机器人运动规划
支持PTP点到点运动,CP连续轨迹运动;同时能够计算不同坐标系之间的转换关系,实现复杂路径控制。
02
多轴机器人控制
系统可以对多轴伺服系统进行统一控制,并支持主流工业通信协议,例如EtherCAT、CANopen等,这些协议可实现伺服驱动与机器人轴系统的实时控制。
03
机器人仿真与调试
通过可视化工具,工程师可以进行:3D仿真、运动测试、虚拟调试以及系统优化。在设备上线前即可完成大部分调试工作,大幅缩短设备交付周期。
04
功能安全
在机器人系统中,安全控制同样至关重要。控制系统可以结合安全PLC与安全I/O模块,实现:
SafeMotion
轴安全监控
TCP(工具中心点)安全监控
确保设备满足工业安全标准。
四
人形机器人时代,控制系统正在重新定义
在人形机器人时代,机器人系统的复杂度正在快速提升:更多自由度关节、更复杂运动学结构、更高实时控制要求、更高安全等级。
这意味着未来的机器人控制系统必须具备:
开放架构
高性能实时控制
多轴运动控制能力
机器人运动学算法支持
只有这样,才能真正支撑下一代机器人应用。
五
Berghof-面向机器人与智能装备的控制方案
作为德国领先的自动化控制技术企业,宏集Berghof Automation已在工业控制领域深耕超过40年,致力于为复杂自动化系统提供高性能控制解决方案。
宏集Berghof控制系统具备以下特点:
基于Linux的高性能控制平台
支持CODESYS开放自动化环境
PLC + Motion + CNC + Robotics一体化
多轴机器人控制能力
支持EtherCAT、CANopen等主流工业总线
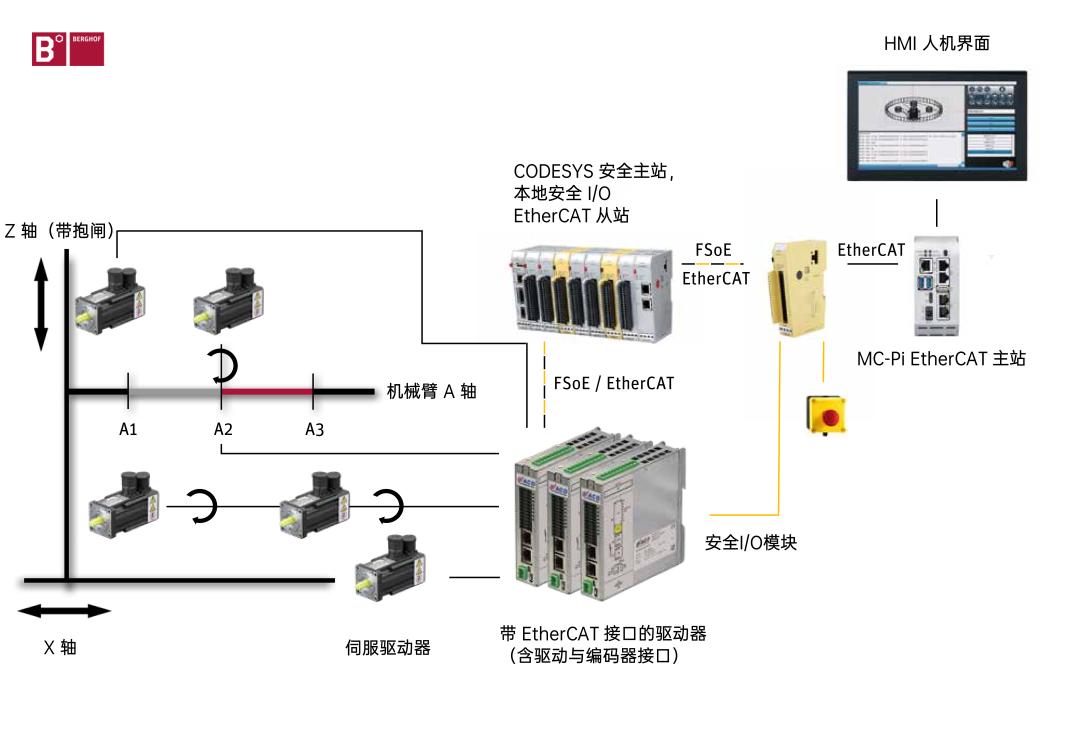
SoftMotion CNC + 机器人(Berghof Option S301)
-机器人运动学控制概念示例
通过SoftMotion CNC + Robotics功能模块,系统可以直接实现机器人运动学控制、多轴协调控制、轨迹规划以及复杂机器人结构控制。
这套系统非常适用于机器人控制系统、智能装备、自动化生产线和柔性制造系统。
结语
在人形机器人与智能装备快速发展的今天,机器人技术的竞争已经不仅仅是硬件结构或AI算法的竞争。真正的核心能力,正在转向机器人控制与运动学系统。
谁能更好地控制机器人,谁就能在未来的自动化时代占据主动。而开放、高性能、可扩展的自动化控制平台,正是这场技术革命的关键基础。
线上研讨会预告
3月24号,宏集将联合虹科多部门举办线上研讨会《具身智能多维度测试解决方案研讨会》,从机器人运动控制、执行器性能测试、环境与可靠性测试等多个角度,分享具身智能系统测试与验证的实践经验与解决方案。
如果您正在从事人形机器人、服务机器人或智能装备研发,欢迎关注并参与本次线上研讨会,一起探讨具身智能技术落地的关键挑战与工程实践!



