TwinCAT3 EtherCAT抓包 | 技术集结
在使用TwinCAT测试EtherCAT EOE功能时,我们会发现正常是无法使用Wireshark去进行网络抓包抓取EtherCAT报文的,今天这篇文章就带大家来上手EtherCAT抓包方式。
准备环境
硬件环境:
EtherKit开发板
网线一根
Type-C USB线一根
软件环境
TwinCAT3
RT-Thread studio
wireshark
EtherCAT EOE工程下载
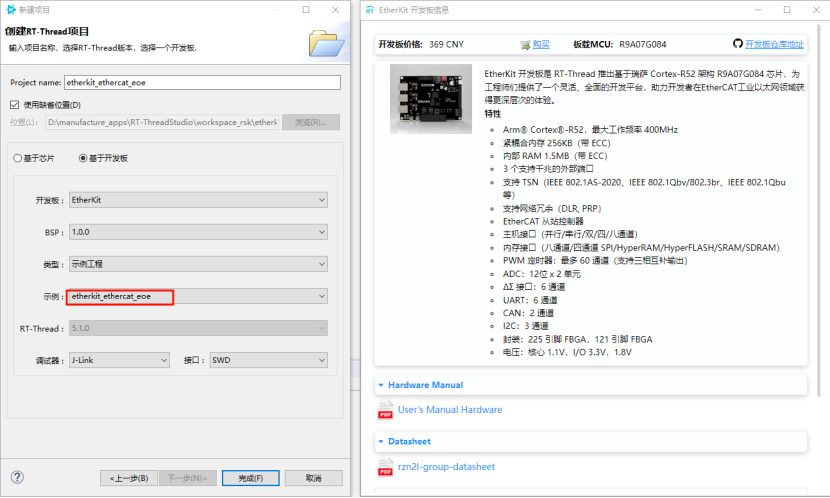
首先 RT-Thread studio 安装 EtherKit SDK 包,然后新建一个示例工程:etherkit_ethercat_eoe,编译并下载程序;
将电脑一端网线连接至 EtherKit 的 ETH0,同时修改以太网适配器IP保持与从站IP在同一网段下:
观察开发板串口状态,此时可以看到 eoe app 已经正常运行了:
TwinCAT3 模拟EtherCAT主站启动
在启动 TwinCAT3过程中还需要配置ESI文件及安装Twin CAT驱动,可参考EtherKit用户手册,此处不再详述;
接下来我们主站扫描从站设备,并激活该从站设备:
激活从站设备后可以看到 EtherKit 开发板板载以太网指示灯正常工作,同时默认从站DC模式为 SM-Synchron :

TwinCAT3配置DC-Synchron
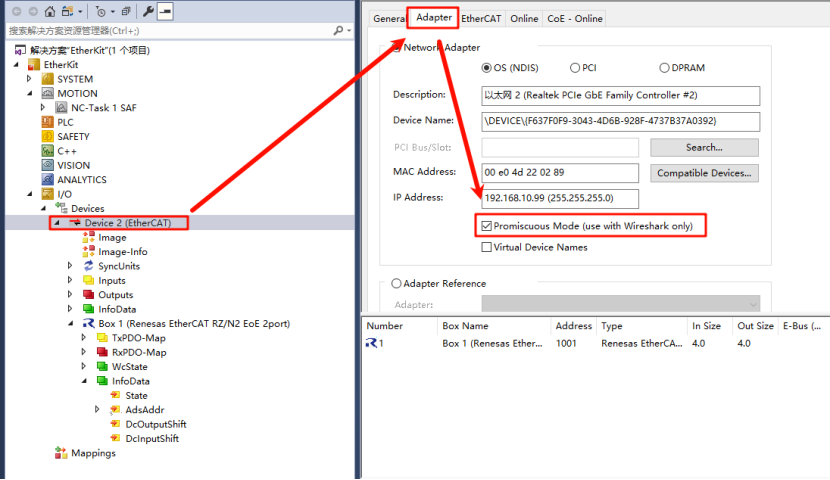
首先我们需要开启 wireshark 抓包支持,右键点击 Device,在 Adapter 中勾选 Promiscuous Mode(use with Wireshark only)来开启混杂模式;
接着我们需要先切换DC模式,由默认的 SM-Synchron 模式切换为 DC-Synchron;
接着我们点击上方导航栏 TwinCAT->Restart TwinCAT(config Mode);

提示 Restart TwinCAT system in config Mode,点击确定;
shell再次提示 Load IO设备,点击确定;

然后点击激活;
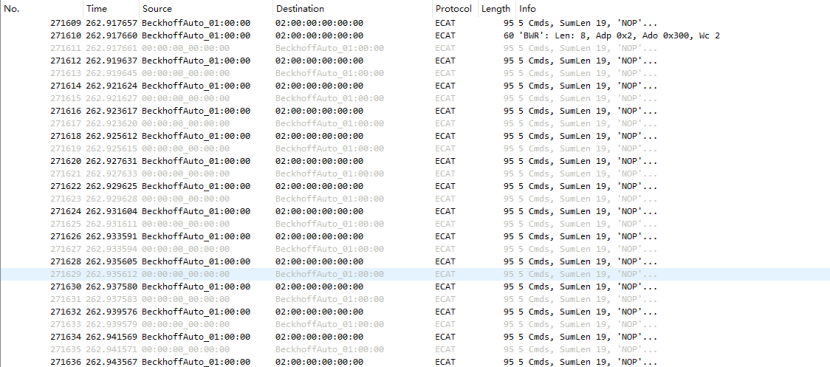
接着我们再切换回 SM-Synchron,并打开wireshark,选择对应的网卡设备,此时就可以看到ECAT报文了;
EtherCAT数据帧结构
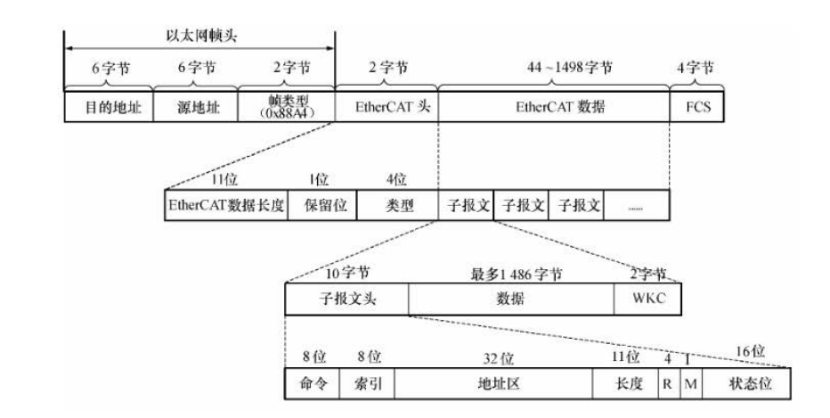
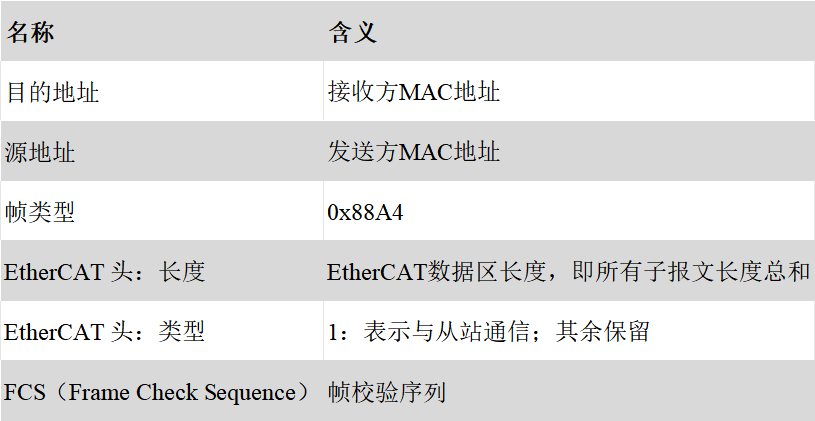
EtherCAT数据直接使用以太网数据帧进行传输,帧类型为0x88A4。一个EtherCAT数据包括2个字节的数据头和44~1498字节的数据,其中数据区由一个或多个EtherCAT子报文组成,每个子报文对应独立的设备或从站存储区域;
EtherCAT帧结构定义
EtherCAT帧结构定义
每个EtherCAT子报文包括子报文头、数据域和相应的工作计数器(WKC,Working Counter);WKC记录了子报文被从站操作的次数,主站为每个通信服务子报文设置预期的WKC,发送子报文中的工作计数器初值为0,子报文被从站正确处理后,工作计数器将增加一个增量,主站比较返回子报文中的WKC和预期WKC来判断子报文是否被正确处理;WKC由ESC在处理数据帧的同时进行处理,不同的通信服务对WKC的增加方式不同;
EtherCAT子报文结构定义

EtherCAT报文分析
1.请求报文
首先我们设置过滤规则:
ecat.cmd==BRD && ecat.ado==0x130
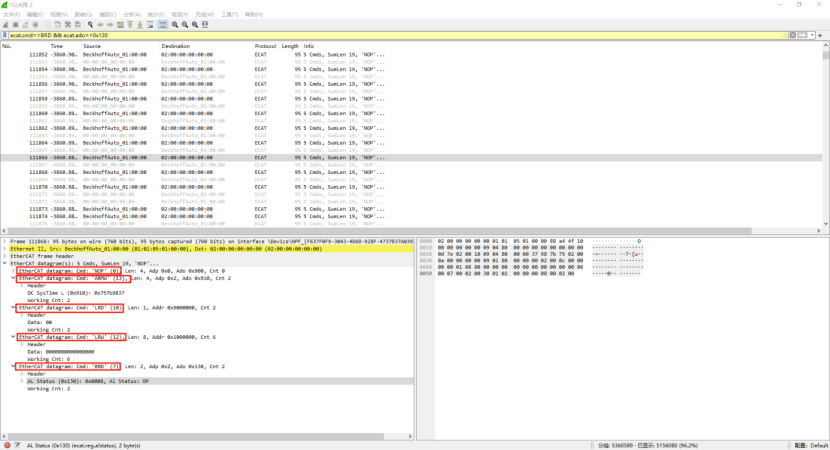
我们随机抓取一条BRD报文,主站向从站发送的偏移地址为 0x130 的报文,表示读取从站特定寄存器(如设备标识符、状态字等)的值。此类报文在系统初始化或状态监测中常被使用。
2.应答报文
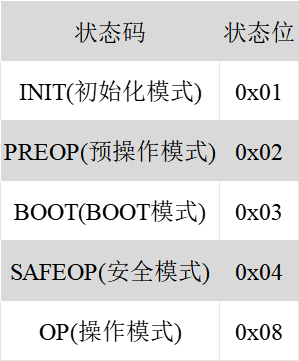
从站启动过程:主站依次向偏移地址 0x120 发送 1、2、4、8 命令,控制从站依次进入初始化(INIT)、预操作(PRE-OP)、安全模式(SAFE-OP)和操作模式(OP):
ecat.ado==0x120 && (ecat.adp==0x03e9 ||ecat.adp==0xffff)
其中 ecat.adp == 0xffff 表示广播方式,主站向所有从站发送命令;而 ecat.adp==0x03e9(例如)表示特定从站地址(可根据实际地址修改)发送控制命令。
3.控制命令与EOE报文过滤
我们使用如下过滤规则来抓取EtherCAT控制命令与以太网封装(EOE, Ethernet over EtherCAT)相关的报文:
(ecat.ado==0x120 || ecat_mailbox.eoe) && (ecat.adp==0x03e9 || ecat.adp==0xffff)
解析说明
ecat.ado==0x120:表示抓取访问地址偏移 0x120 的寄存器命令,此为 从站状态控制寄存器,主站通过它向从站发送模式切换指令(如INIT、PRE-OP、SAFE-OP、OP);
ecat_mailbox.eoe:表示抓取所有 EOE协议封装的以太网数据,EOE允许通过EtherCAT传输标准以太网帧(如TCP/IP、UDP);
ecat.adp==0x03e9:指定从站地址为 0x03e9(十进制1001),用于单个从站点对点通信;
ecat.adp==0xffff:表示广播命令,主站向所有从站同时发起操作。
应用场景
此过滤规则可用于同时监控:
主站对某个从站(或全部从站)的工作模式控制行为;
通过EOE传输的数据帧(常见于使用TCP/IP通信的EtherCAT从站,如带IP接口的远程IO模块或工业摄像头);
下面是使用Wireshark实际抓包情况:

4. EtherCAT EOE抓包TCP报文
首先我们修改工程目录下的 src/hal_entry.c 文件,将该文件全部替换为如下代码:
/** Copyright (c) 2006-2024, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2024-03-11 Wangyuqiang first version*/#include#include"hal_data.h"#include#include#include#include#include#include#defineBUFSZ (1024)staticconstcharsend_data[] ="This is TCP Server from RT-Thread.";voidhal_entry(void){ rt_kprintf("\nHello RT-Thread!\n"); rt_kprintf("==================================================\n"); rt_kprintf("This example project is an ethercat eoe routine!\n"); rt_kprintf("==================================================\n");}staticvoidtcpserv(void*parameter){ char*recv_data;/* 用于接收的指针,后面会做一次动态分配以请求可用内存 */ socklen_tsin_size; intsock, connected, bytes_received; structsockaddr_inserver_addr, client_addr; rt_bool_tstop = RT_FALSE;/* 停止标志 */ intret; recv_data =rt_malloc(BUFSZ +1);/* 分配接收用的数据缓冲 */ if(recv_data == RT_NULL) { rt_kprintf("No memory\n"); return; } /* 一个socket在使用前,需要预先创建出来,指定SOCK_STREAM为TCP的socket */ if((sock =socket(AF_INET, SOCK_STREAM,0)) ==-1) { /* 创建失败的错误处理 */ rt_kprintf("Socket error\n"); /* 释放已分配的接收缓冲 */ rt_free(recv_data); return; } /* 初始化服务端地址 */ server_addr.sin_family = AF_INET; server_addr.sin_port =htons(5000);/* 服务端工作的端口 */ server_addr.sin_addr.s_addr = INADDR_ANY; rt_memset(&(server_addr.sin_zero),0,sizeof(server_addr.sin_zero)); /* 绑定socket到服务端地址 */ if(bind(sock, (structsockaddr *)&server_addr,sizeof(structsockaddr)) ==-1) { /* 绑定失败 */ rt_kprintf("Unable to bind\n"); /* 释放已分配的接收缓冲 */ rt_free(recv_data); return; } /* 在socket上进行监听 */ if(listen(sock,5) ==-1) { rt_kprintf("Listen error\n"); /* release recv buffer */ rt_free(recv_data); return; } rt_kprintf("\nTCPServer Waiting for client on port 5000...\n"); while(stop != RT_TRUE) { sin_size =sizeof(structsockaddr_in); /* 接受一个客户端连接socket的请求,这个函数调用是阻塞式的 */ connected =accept(sock, (structsockaddr *)&client_addr, &sin_size); /* 返回的是连接成功的socket */ if(connected < 0) { rt_kprintf("accept connection failed! errno = %d\n", errno); continue; } /* 接受返回的client_addr指向了客户端的地址信息 */ rt_kprintf("I got a connection from (%s , %d)\n", inet_ntoa(client_addr.sin_addr), ntohs(client_addr.sin_port)); /* 客户端连接的处理 */ while (1) { /* 发送数据到connected socket */ ret = send(connected, send_data, strlen(send_data), 0); if (ret < 0) { /* 发送失败,关闭这个连接 */ closesocket(connected); rt_kprintf("\nsend error,close the socket.\r\n"); break; } else if (ret == 0) { /* 打印send函数返回值为0的警告信息 */ rt_kprintf("\n Send warning,send function return 0.\r\n"); } /* 从connected socket中接收数据,接收buffer是1024大小,但并不一定能够收到1024大小的数据 */ bytes_received = recv(connected, recv_data, BUFSZ, 0); if (bytes_received < 0) { /* 接收失败,关闭这个connected socket */ closesocket(connected); break; } else if (bytes_received == 0) { /* 打印recv函数返回值为0的警告信息 */ rt_kprintf("\nReceived warning,recv function return 0.\r\n"); closesocket(connected); break; } /* 有接收到数据,把末端清零 */ recv_data[bytes_received] = '\0'; if (strcmp(recv_data, "q") == 0 || strcmp(recv_data, "Q") == 0) { /* 如果是首字母是q或Q,关闭这个连接 */ closesocket(connected); break; } else if (strcmp(recv_data, "exit") == 0) { /* 如果接收的是exit,则关闭整个服务端 */ closesocket(connected); stop = RT_TRUE; break; } else { /* 在控制终端显示收到的数据 */ rt_kprintf("RECEIVED DATA = %s \n", recv_data); } } } /* 退出服务 */ closesocket(sock); /* 释放接收缓冲 */ rt_free(recv_data); return ;}static int tcpserv_app(void){ rt_thread_t tcps = rt_thread_create("tcpserv", tcpserv, RT_NULL, 2048, 18, 10); if(tcps != RT_NULL) { rt_thread_startup(tcps); } return 0;}
编译下载后重新烧录程序并启动,在从站成功连接到主站后,执行 tcpserv_app 指令来启动一个 TCP Server:

同时我们打开 TCP 测试软件,配置 TCP 客户端,配置信息如下:
目标IP:192.168.10.100(从站IP)
目标端口:5000
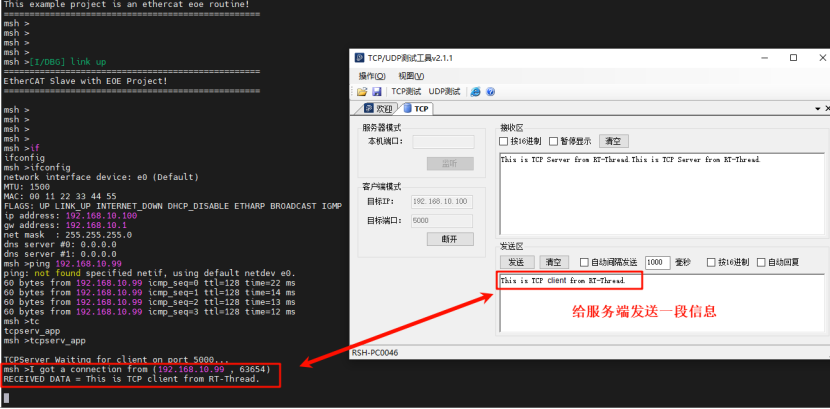
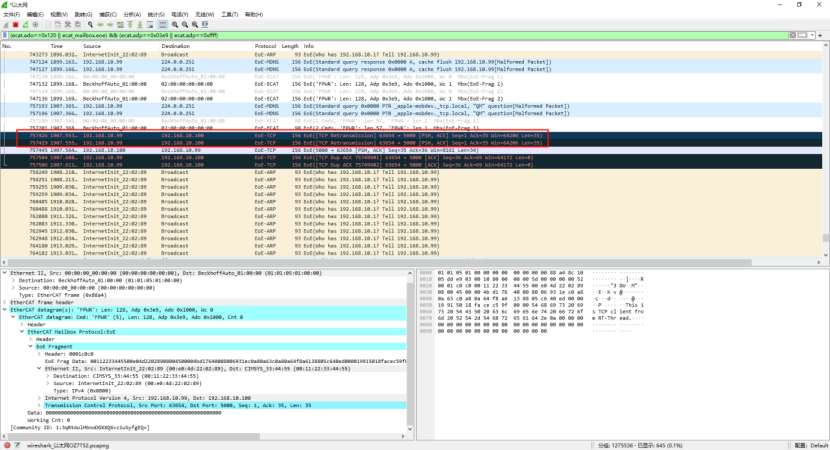
同时打开 Wireshark ,查看 EtherCAT EOE网络下的 TCP报文能够被成功捕获:
附录1 EtherCAT通信服务命令
EtherCAT 子报文所有的服务都是以主站操作描述的。数据链路层去规定了从站内部物理存储、读写和交换(读取并马上写入)数据的服务。读写操作和寻址方式共同决定了子报文的通信服务类型, 由子报文头中的命令字节表示:
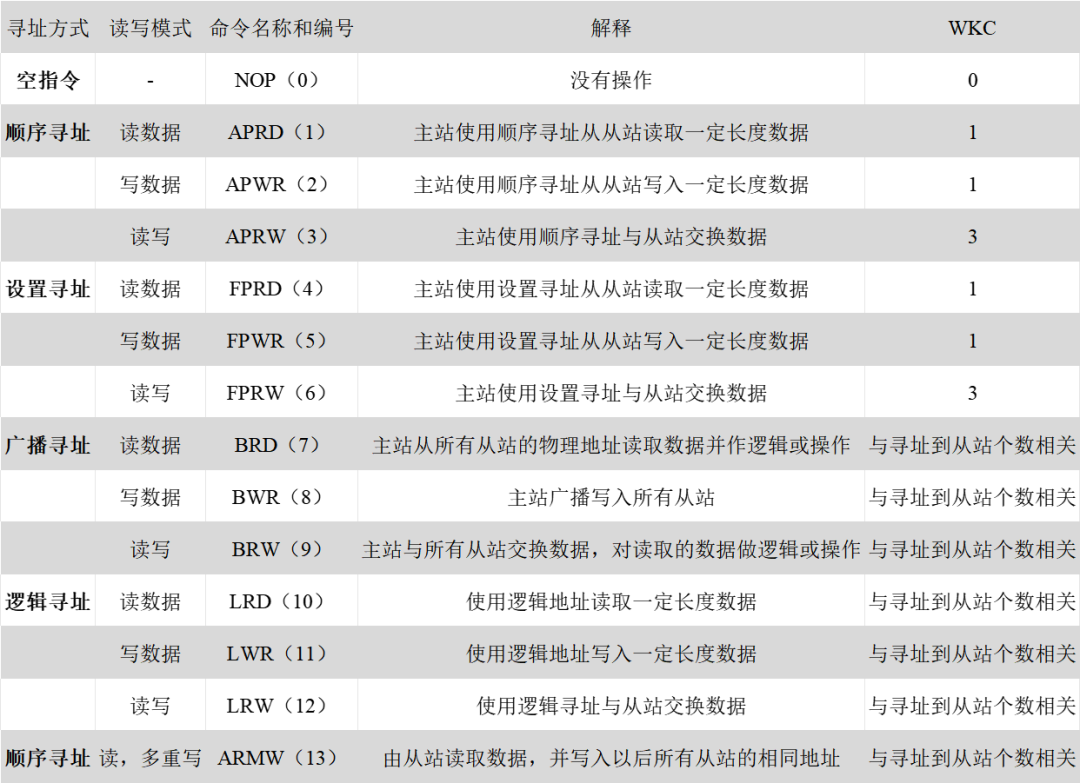
主站接收到返回数据帧后,检查子报文中的WKC,如果不等于预期值,则表示此子报文没有被正确处理。子报文的WKC预期值与通信服务类型和寻址地址相关。子报文经过某一个从站时,如果是单独地读或写操作, WKC 加1 。如果是读写操作, 读成功时WKC加1,写成功时WKC 加2 ,读写全部完成时WKC加3,子报文由多个从站处理时, WKC是各个从站处理结果的累加。
附录2 EtherCAT状态码